
Page 46 - Electronic Navigation Cyber Book
P. 46
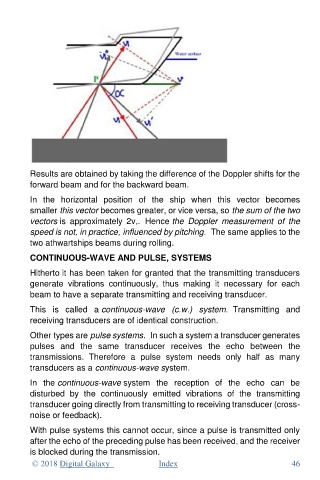
Results are obtained by taking the difference of the Doppler shifts for the
forward beam and for the backward beam.
In the horizontal position of the ship when this vector becomes
smaller this vector becomes greater, or vice versa, so the sum of the two
vectors is approximately 2v,. Hence the Doppler measurement of the
speed is not, in practice, influenced by pitching. The same applies to the
two athwartships beams during rolling.
CONTINUOUS-WAVE AND PULSE, SYSTEMS
Hitherto it has been taken for granted that the transmitting transducers
generate vibrations continuously, thus making it necessary for each
beam to have a separate transmitting and receiving transducer.
This is called a continuous-wave (c.w.) system. Transmitting and
receiving transducers are of identical construction.
Other types are pulse systems. In such a system a transducer generates
pulses and the same transducer receives the echo between the
transmissions. Therefore a pulse system needs only half as many
transducers as a continuous-wave system.
In the continuous-wave system the reception of the echo can be
disturbed by the continuously emitted vibrations of the transmitting
transducer going directly from transmitting to receiving transducer (cross-
noise or feedback).
With pulse systems this cannot occur, since a pulse is transmitted only
after the echo of the preceding pulse has been received, and the receiver
is blocked during the transmission.
© 2018 Digital Galaxy Index 46